Current Projects

In an age where intelligent robots are becoming increasingly relevant, Project GRASP aims to explore and experiment with robotic foundation models for visuomotor policies in general-purpose robotic manipulation. The team is building simulated and real-world setups for single-arm pick-and-place tasks, using cutting-edge AI to develop end-to-end learning workflows. This not only allows for scalable, adaptable robotic control but also offers hands-on exposure to frontier tech, making it a career-boosting learning ground in AI-driven robotics.

Indoor navigation without relying on maps is a core challenge in autonomous robotics, and Project PathBlazer directly addresses this. The team is developing a robust robotic navigation system that uses reinforcement learning and sensor fusion to adapt in real time to dynamic environments. The ultimate goal is to enable fast, human-aware, and safe movement in unknown spaces — pushing the limits of mapless navigation while sharpening members' skills in ROS2, CV, and system debugging.
With a growing need for dexterous and adaptive robotic manipulators, Project HANDy is developing a precision-controlled robotic arm capable of performing complex tasks using advanced kinematics and automation. The team is engineering an articulated system that integrates real-world flexibility and control, making it suitable for a wide range of industrial and assistive tasks. Through this, members gain deep insights into core robotics concepts, collaborative systems design, and real-time motion control.

To tackle the challenges of adaptive grasping in unstructured environments, Project MORPH is working on a gripper that utilizes both shape and force control. The team is engineering mechanical and software systems that allow the gripper to modify its form dynamically, thereby improving grip reliability across diverse object types. The project blends robotics hardware with smart sensing and control, giving team members comprehensive exposure to robotics integration and real-world application.

Project BioGrip merges biotechnology and robotics in a powerful collaboration aimed at improving lives. The team is designing an EMG/EEG-controlled robotic arm that interprets brain and muscle signals to perform real-time robotic arm control. This initiative empowers individuals with disabilities to interact with the physical world more intuitively, while giving the team hands-on experience with biosignal processing, machine learning for HMI, and advanced kinematic modeling.
Previous Projects

In dynamic spaces like museums and malls, Samvid is envisioned as an autonomous humanoid robot designed to enhance user navigation and engagement. Leveraging cutting-edge speech synthesis via innoguideGPT, seamless path planning, and intuitive interfaces, it acts as a real-time guide and assistant. The project evaluates Samvid’s efficiency in improving user experience and accessibility in crowded indoor environments—positioning it as a future-ready service robot.

Competing in the international Robocon 2025, Team Chetak focuses on building a technically advanced robot that can autonomously navigate, execute precise mechanical tasks, and adapt strategy in real-time—all while adhering to strict competition constraints. The project demands a high level of collaboration and engineering skill, and through this challenge, the team hones its capabilities in systems design, optimization, and compliance under pressure.

Project CoBALT sets out to redefine warehouse automation through modular, scalable robots that navigate autonomously and collaborate in swarm-like behavior. The team has completed simulations involving three bots and successfully built one working prototype, all engineered for efficient order handling and dynamic path planning. With a focus on swarm intelligence and CV integration, CoBALT tackles real-world logistics by building bots that are responsive, adaptable, and scalable.

In response to the risks faced during landmine disposal, Project M.I.N.E. proposes an intelligent robot designed to autonomously detect and neutralize explosive threats. Unlike traditional manual methods, this system aims to drastically reduce human involvement, ensuring safety through precise detection and timely neutralization. It’s a high-impact, research-driven initiative focused on saving lives and transforming security practices.

Krishika project description here.Born from a challenge at the Inter-IIT Tech Meet, Krishaka evolved into a fully autonomous agricultural robot capable of executing key tasks like weeding, ploughing, sowing, and fertilizing. Designed for marginal farmers, it combines affordability with utility and has now progressed to a startup incubated under Nirmaan. The project aims to bring robotic precision to traditional farming, improving yield, reducing labor, and empowering rural India
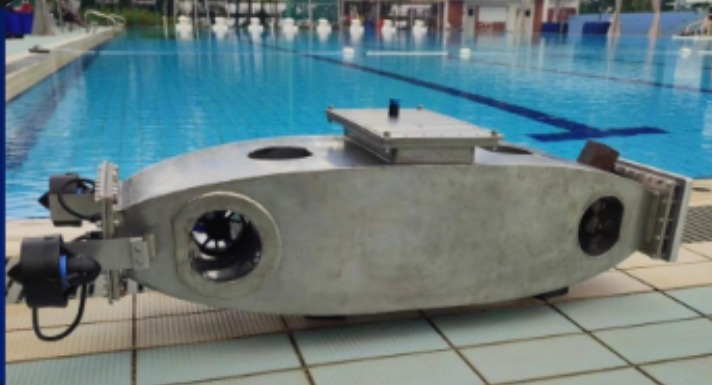
Amogh is an autonomous underwater vehicle developed to push the boundaries of marine robotics. Created in under a year, it competed at the Singapore Autonomous Underwater Vehicle Challenge, where it earned a remarkable 9th place among 30+ global teams. Through Amogh, the team mastered underwater navigation, sensor integration, and robustness—showcasing the iBot Club’s proficiency in real-world autonomous systems.
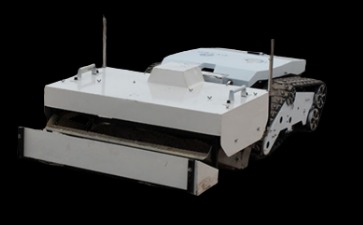
The Beach Cleaning Bot addresses environmental waste on Chennai’s coastlines with an autonomous robot designed to sieve sand and collect trash while navigating independently. Developed through modular efforts in mechanics, navigation, and electrical design, BCB integrates sonar sensors, GPS-based geo-fencing, and a Raspberry Pi brain to operate within defined beach zones. Its mission: to preserve natural beauty through automation while minimizing environmental disruption.